太陽探査機「ユリシーズ」
黄道面を離脱した軌道を取る探査機「ユリシーズ」(Credit:ESA)
ユリシーズのミッションと探査機の概要

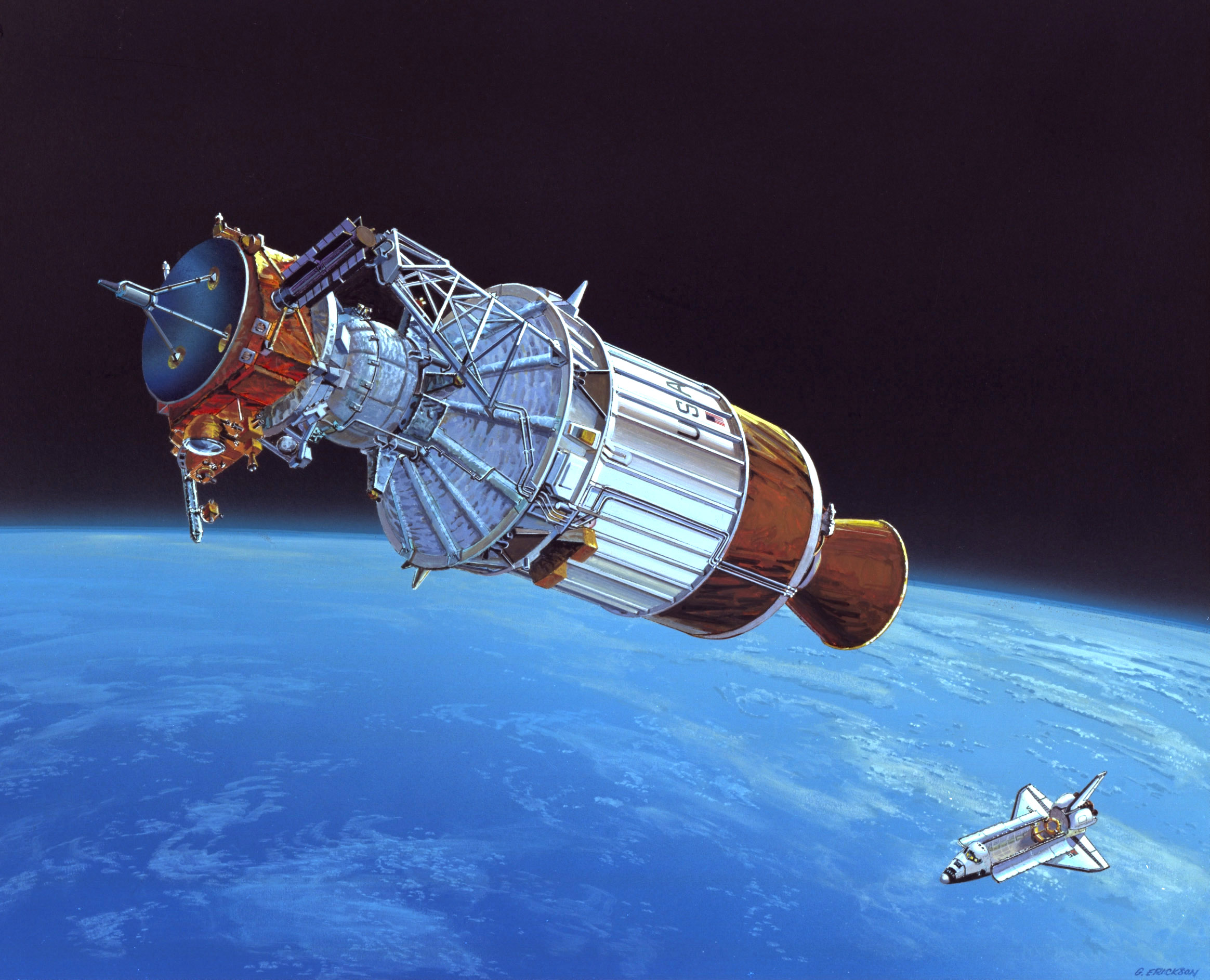
ユリシーズを打ち上げる、スペースシャトル・ディスカバリー(Credit:NASA)
ユリシーズはアメリカ航空宇宙局NASAと、ヨーロッパ宇宙機関ESAによる共同太陽観測ミッションです。この探査機の大きな特徴は太陽の北極と南極における観測を行う事にあります。これまでの宇宙探査機は太陽に対する地球の公転面(黄道面)にほぼ平行な軌道へと投入されてきました。これは探査機を送り出す際、対象となる惑星や小惑星といった天体もほぼ黄道面と並行であるため、地球の公転面に沿って打ち上げるためです。しかもそうした軌道では太陽の極域の観測は見ることができず、その黄道面を離脱して言わば太陽系を「太陽の南北方向から見る」という探査機が必要とされてきました。
黄道面を離脱するミッションとして考えられたのは1970年代初頭にNASAとESAは黄道面離脱ミッション「OOE(Out Of Ecliptic)」が検討されました。黄道面を離脱するには、太陽に対する公転軌道に対し、その軌道傾斜角を大きく曲げる必要があります。それには探査機を大きく加速させる必要があり、その方法として木星スイングバイを用いるというものです。スイングバイは惑星探査機に航行に広く用いられている宇宙航法で、ある惑星へと向かう際にその途中にある惑星の重力を利用した加減速や軌道変更を行うという手法です。惑星の重力を用いるわけですから探査機が必要とする推進剤を減らすことができます。

太陽を極域から観測するユリシーズ(Credit:ESA)
最終的にこのミッションは、国際太陽極域ミッション「ISPM」として1976年に発足しました。NASAとESAで探査機を1機づつ建造し、その2機の探査機を1983年に打ち上げることを目指した計画でしたが、NASAの予算不足によりNASA側の機体はキャンセルされてしまいました。そのため機体はESAのもののみを打ち上げる事となり、観測機器の半分と原子力電池、そして打ち上げ手段をNASAが提供することとなりました。そして1984年、ISPM計画は「ユリシーズ」という名前がつけられることになります。
ユリシーズは1986年にスペースシャトルを用いて打ち上げが予定されていました。しかし同年に発生したスペースシャトル「チャレンジャー」の事故とその原因究明により、4年間遅れること1990年の秋に打ち上げられる事となりました。
探査機の諸元
| 運用 | ESA/NASA |
|---|---|
| 打上機 | スペースシャトル「ディスカバリー」 |
| 打上日 | 1990年10月6日11時47分15秒 |
| 運用終了日 | 2009年6月30日 |
| COSPAR-ID | 1990-090B |
| 重量 | 370kg |
| 電源 | 熱電変換型原子力電池「GPHS-RTG」 |
| 科学観測機器 |
VHM/FGM:磁力計 SWOOPS:太陽極域太陽風観測装置 SWICS:太陽風イオン組成分析計 URAP:電波・プラズマ波動観測装置 EPAC/GAS:高エネルギー粒子組成・惑星間中性ガス観測装置 HI-SCALE:低エネルギーイオン・電子観測装置 COSPIN:宇宙線・太陽粒子観測装置 GRB:ガンマ線バースト検出器 DUST:ダスト検出器 SCE:太陽コロナ実験 GWE:重力波実験 |
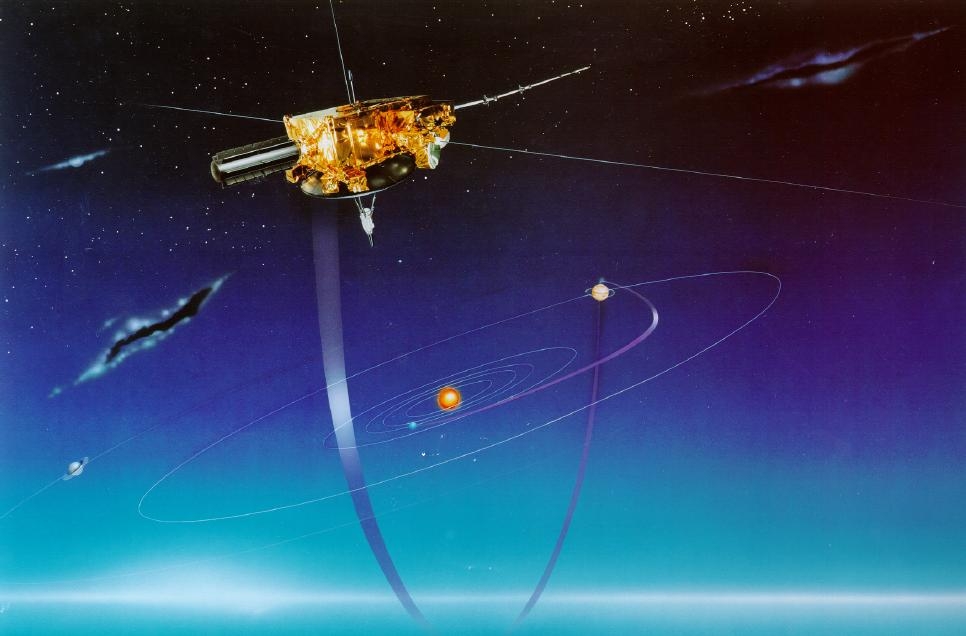
ユリシーズの機体
構体

ユリシーズから展開されるブーム(Credit:ESA)
ユリシーズはアルミニウム製の箱型の探査機です。サイズは2メートル×2メートル×1メートルです。中心部に1.65メートルのパラボラ型のハイゲインアンテナが搭載されています。探査機の姿勢制御はスピン安定で、ハイゲインアンテナを中心に毎分5回転(5rpm)で回転します。
電源となる原子力電池からの熱やガンマ線等の放射線が機器に影響を与えないよう、構体を挟んで反対側に観測機器などが設置されています。また、折りたたまれた状態から展開するブームには磁力計、太陽X線センサ、ガンマ線バースト検出器などが取り付けられています。この展開式のブームは2のヒンジ(蝶番)を持つことで展開時に最大限の長さを実現できるほか、格納時と展開時のどちらにおいても探査機の重心のバランスが崩れないようになっています。スピン安定の探査機は重量バランスがシビアであり、こうした展開機構の出し入れによってそのバランスが崩れたりしないようにする必要があります。このほか、ワイヤブームで展開することで、端から端まで72.5メートルにもなるアンテナなども取り付けられています。
熱制御
熱制御においては探査機を適温に保つ必要があります。例えばコンピュータや観測機器などの電子機器は動作可能温度範囲内に収める必要がありますし、推進剤も温度が下がり過ぎて凍結しないようにする必要があります。この熱制御には放熱用のラジエータとサーマルブランケット、電熱ヒータが用いられています。サーマルブランケットはMLIとも呼ばれ、探査機の周囲を覆う金色のものです。アルミニウムがコーティングされた層が20層あり、最も外側の層は帯電防止のため、インジウム・スズの酸化物による導電性コーティングが施されています。
電源
ユリシーズの電源はプルトニウム238を利用した原子力電池によって賄われます。ユリシーズは軌道傾斜角を大きく変えるために木星の重力を利用したスイングバイを行う関係で一度太陽から遠く離れてしまいます。そのため太陽光が少なくなる木星近辺での太陽電池を用いた運用には限界があるため、太陽からの距離に依存しない原子力電池が採用されました。これはプルトニウム238がアルファ崩壊することによって生じる崩壊熱と呼ばれる熱を利用し、宇宙空間に曝された冷却側との温度差による熱電発電を行います。これはゼーベック効果と呼ばれ、電力への変換効率は数パーセント程度と低いものの、可動部等が無く非常に信頼性の高い電源システムです。
姿勢制御
ユリシーズの姿勢や軌道の制御はAOCSと呼ばれるシステムでなされています。姿勢制御ではスピン安定の機体の回転数を一定させつつ、地球へと指向させることで通信を確立させます。地球への指向はCONSTANシステムと呼ばれるものが利用され、これは冗長化された太陽センサを用いて回転数や太陽の方向を観測して姿勢の測定と制御を行います。
このAOCSの姿勢データはユリシーズ自身が何らかのトラブルが生じた際にそのトラブルを検出し、かつ回復するためにも用いられています。姿勢制御は8つ搭載された二液式ヒドラジンスラスタによって行われます・このスラスタは4つでセットになっており、これが冗長系として2セット搭載されています。
通信
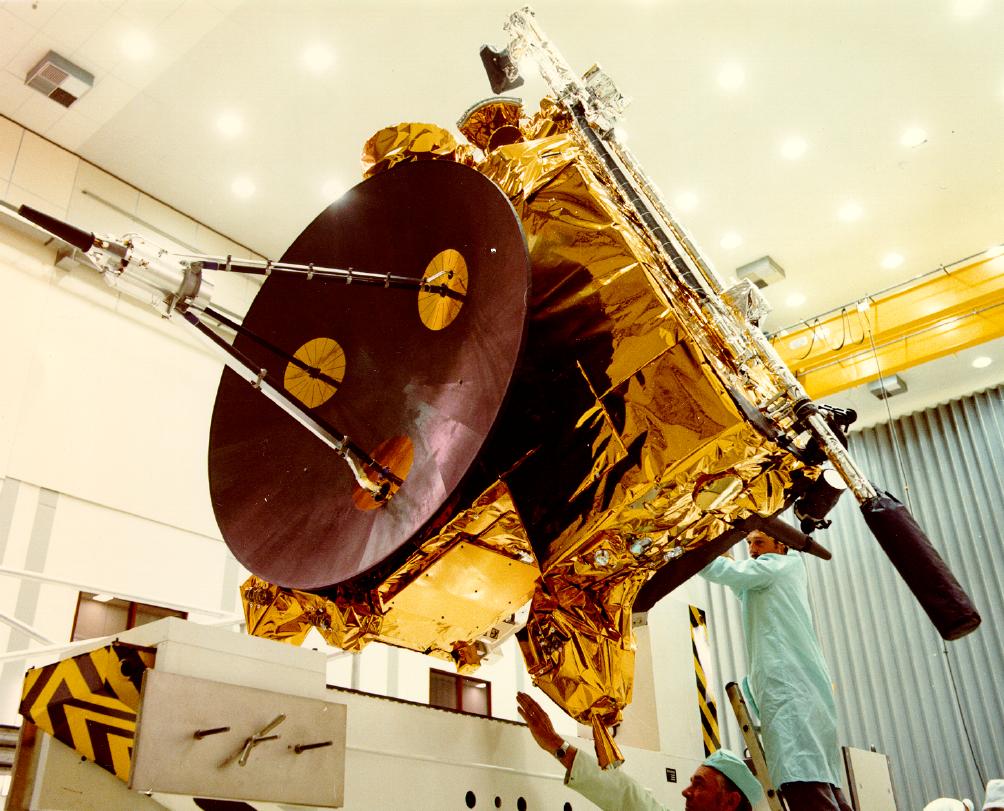
ハイゲインアンテナから三本伸びた支柱の先にローゲインアンテナが配置されている(Credit:ESA)
ユリシーズにはハイゲインアンテナと、ローゲインアンテナが2つ搭載されています。ハイゲインアンテナは1.65メートルの直径を持つ強化炭素繊維製のパラボラアンテナで、ユリシーズは地球と最大8キロビット毎秒の通信を実現します。使用する周波数はダウンリンク専用で20Wの出力を持つXバンド(8.4GHz)と、アップリンクとダウンリンクに用いられる5WのSバンド(アップリンクが2112MHz、ダウンリンクが2293MHz)です。ローゲインアンテナはSバンドのみで何らかの理由でハイゲインアンテナが地球に指向できなくなった場合などに利用されます。ローゲインアンテナはパラボラアンテナの上部に取り付けられている「LGA/F」と、その反対側に取り付けられている「LGA/R」があります。
データ処理
探査機のデータ処理はDHSと呼ばれるサブシステムで行われます。探査機のテレメトリの取得と処理を行い、送信機と通信アンテナで構成されるTTCへとデータを受け渡します。また地球と通信を行なっていない間のデータは45メガビットの容量を持つ磁気テープレコーダ、もしくはDHS内部のデータストレージ、DSUに保存されます。また、地球からのコマンドを受信するとこれをデコードし、探査機のそれぞれのシステムの制御を行います。
スペースシャトルでの打ち上げ
「IUS」と「PAM-S」の固体三段構成でディスカバリーから放出されるユリシーズ(Credit:ESA)
ユリシーズは1990年10月6日にスペースシャトル「ディスカバリー」によって打ち上げられました。スペースシャトルのカーゴベイに慣性上段ロケット「IUS」とペイロード・アシスト・モジュール「PAM-S」に搭載されています。これらの固体ロケットモータは人工衛星の軌道投入に用いられますが、基本的にはそれぞれ単体で使用するものです。ユリシーズ打ち上げの際には探査機を高速に加速する必要があったため、この2つを組み合わせています。
スペースシャトルから切り離され、木星へ向けて打ち上げられたユリシーズは、冥王星探査機「ニュー・ホライズンズ」に次いで人類で二番目に加速された物体となりました。
BOOTHにて宇宙開発や原子力関連の同人誌を販売しております。